
DGL-System 2.Ordnung |
| 11.05.2011, 11:34 | emad.sdp | Auf diesen Beitrag antworten » | ||
| DGL-System 2.Ordnung Hallo Zusammen, im Rahmen meiner Studienarbeit habe ich ein Feder-Dämpfer-Modell, dessen Dynamik mit einem 2. Ordnung DGL-System dargestellt wird. m1.x"+c.x'+k.x=c.y'+k.y-l m2.y"+c.y'+k.y=c.x'+k.x+l m1, m2, c, k und l sind bekannt. Matrix-Form: X"+A¹.X'+A².X=A³ X=[x,y] und A¹,A²,A³ sind Matrices Ich brauche eine analytische Lösung dieses DGL-Systems! Jetzt ist es die Frage, ob es überhaupt eine analytische Lösung dafür gibt oder muss es numerisch gelöst werden? Danke Euch Emad Meine Ideen: Ich habe mal versucht durch Einsetzen der Gleichungen ineinander und mittels Anfangsbedingungen zwei getrennte DGL zu kriegen (Die Parameter sind so, dass man so was machen kann). Aber das Ergebnis war nicht logisch. Es scheint so, dass somit einige Anfangsbedingungen weg sind! |
||||
| 11.05.2011, 13:16 | Ehos | Auf diesen Beitrag antworten » | ||
Du hast ein Gleichungssystem 2.Ordnung mit 2 Variablen Wandle dieses System in ein System 1.Ordnung mit 4 Variablen um, indem du 2 zusätzliche Variablen und einführst Einsetzen oben liefert Die letztgenannten 4 Gleichungen lauten in Matrixform Ignoriere zunächst die rechte Seite und mache für das homogene System den folgenden Exponentialansatz: Dabei ist ein konstanter Vektor und eine noch unbekannten Zahl. Einsetzen in das Gleichungssystem (ohne rechte Seite) und anschließende Division durch die e-Funktion führt auf folgendes Gleichungsysstem für den Vektor Dieses Gleichungssystem hat nur dann eine nichttriviale Lösung, wenn die Koeffizientendeterminanate verschwindet. Berechne also diejenigen , wo dies der Fall ist. Das führt auf eine algebraische Gleichung 4.Grades für , die man mit der Lösungsformel oder numerisch lösen kann. Man bekommt 4 Werte , wobei einige identisch sein können. Gemäß obigem Ansatz hat man 4 Lösungen des homogenen Gleichungssystems (also ohne rechte Seite). Die Lösung des inhomogenen Systems (also mit rechter Seite) findet man leicht, indem man zu der homogenen Lösung einen geeigneten Vektor addiert. Letzteres ist hier einfach, weil die rechte Seite ebenfalls ein konstanter Vektor ist. |
||||
| 11.05.2011, 13:26 | René Gruber | Auf diesen Beitrag antworten » | ||
Bei der sehr speziellen Struktur hier kann man die Anzahl der Variablen schon zu Beginn auf die Hälfte reduzieren: Die Summe der beiden DGL ergibt , nach zweifacher Integration also folgenden Zusammenhang zwischen und : Bei Kenntnis der Anfangswerte kann man die hier auftretenden Konstanten auch gleich mal berechnen. (Wenn es um ein Federsystem geht mit anzunehmenden örtlich beschränkten , dann wird ja sicherlich sein, oder?) Wie auch immer, mit (*) kann man schon mal eliminieren und hat dann "nur" noch eine DGL zweiter Ordnung in der einen Variable . |
||||
| 11.05.2011, 13:41 | Ehos | Auf diesen Beitrag antworten » | ||
@Rene Gruber Stimmt. In diesem speziellen Fall wird die Sache sehr einfach. Hab' ich gar nicht gesehen. Respekt! |
||||
| 11.05.2011, 15:03 | emad.sdp | Auf diesen Beitrag antworten » | ||
Hi, @ Ehos: Danke dir. So dass ich sehe, ist es für alle solche DGL-Systeme (2.Ordnung, linear) anwendbar. oder? @Rene: Danke Rene. Ich habe mal versucht, das DGL-System genau so zu lösen. Aber das Ergebnis war nicht real! Wenn es mathematisch richtig war, dann sollte es vielleicht an Anfangswerte liegen! |
||||
| 11.05.2011, 15:08 | René Gruber | Auf diesen Beitrag antworten » | ||
Irgendwie kann ich mit der Aussage nichts anfangen. Erklärung bitte! |
||||
| Anzeige | ||||
|
|
||||
| 11.05.2011, 15:29 | Ehos | Auf diesen Beitrag antworten » | ||
@emad.sdp Ja, meine Vorgehensweise ist der allgemeine Weg. Aber in bestimmten Fällen (wie bei deiner Aufgabe) wird es einfacher. |
||||
| 11.05.2011, 18:42 | emad.sdp | Auf diesen Beitrag antworten » | ||
Hallo @ Rene Also es geht um ein einfaches Voigt-Kelvin-Modell einer Kollision. D.h. zwei Masse mit einem Feder und Dämpfer dazwischen: 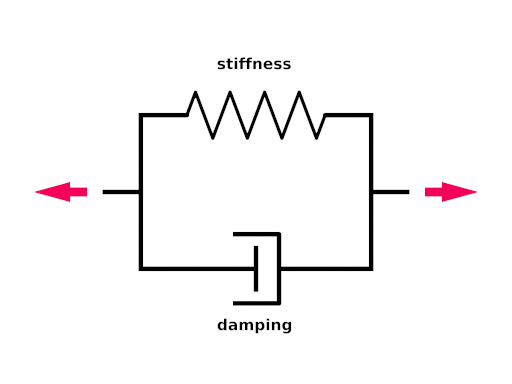 http://megapov.inetart.net/manual-1.2/img/con_vk.png http://megapov.inetart.net/manual-1.2/img/con_vk.pngAus den Newtonschen Regeln: Daraus kommt das DGL-System: Wie du gesagt hast, kann man diese beide in einander einsetzen und mittels Anfangswerten zwei unabhängige DGL (2.Ordnung) kriegen. Dafür sind die Anfangswerte wie folge: l ist der Abstand zwischen den Massen im Zeitpunkt t=0. Also, diese Anfangswerte werden auch für die Lösung der DGL genutzt und so hat man und ich habe folgende Diagramme für :  http://s7.directupload.net/images/110511/tdt7mo6c.jpg http://s7.directupload.net/images/110511/tdt7mo6c.jpg http://s1.directupload.net/images/110511/a5n9yswa.jpg http://s1.directupload.net/images/110511/a5n9yswa.jpg http://s1.directupload.net/images/110511/h8tn55ve.jpg http://s1.directupload.net/images/110511/h8tn55ve.jpgBisher ist es realistisch. Aber wenn ich die Anfangswerte so ändere dass bekomme ich die folgenden Diagramme!  http://s7.directupload.net/images/110511/nryzqt3j.jpg http://s7.directupload.net/images/110511/nryzqt3j.jpg http://s1.directupload.net/images/110511/um98pgbf.jpg http://s1.directupload.net/images/110511/um98pgbf.jpg http://s1.directupload.net/images/110511/ewtgc7fz.jpg http://s1.directupload.net/images/110511/ewtgc7fz.jpgEs muss aber keine Kraft bzw. x" geben! Ich weiss nicht. Bin ich mit den Anfangswerten irgendwie falsch?! Danke im Voraus Emad |
||||
| 11.05.2011, 18:51 | René Gruber | Auf diesen Beitrag antworten » | ||
Ich denke, dazu habe ich oben auch schon mal was gesagt:
Andernfalls driftet wegen nämlich mindestens eine der beiden Komponenten für weg, bleibt also nicht mehr "lokal" - in deinem letzten Beispiel sogar alle beide. Was heißt nun für deine Anfangsbedingungen? Nun, aus (*) folgt mit , das muss auch für t=0 gelten, d.h. . Wie diese Forderung jetzt mit einer physikalischen Erklärung in Einklang zu bringen ist, überlasse ich mal dir. 
Von der Struktur her riecht es so ein wenig nach Impulserhaltung... |
||||
| 11.05.2011, 19:37 | emad.sdp | Auf diesen Beitrag antworten » | ||
aber habe ich direkt von Anfangsbedingungen! d.h. Meinst du dass ich diese DGL nur für den Fall nutzen darf? oder habe ich falsch verstanden? 
P.s: aus der Impulserhaltung kommt und das stimmt auch bei diesem Modell und Anfangsbedingungen (mittelbar geteilt von ) |
||||
|
|
Verwandte Themen
| Die Beliebtesten » |
|
| Die Größten » |
|
| Die Neuesten » |
|
