
Lösung eines Geometrischen Gleichungssystems |
| 30.06.2011, 09:35 | Robot1011 | Auf diesen Beitrag antworten » |
| Lösung eines Geometrischen Gleichungssystems Ich habe mit meinem Roboter gerade ein Mathematisches Problem bei dem ich auf keinen grünen Zweig komme. Und zwar möchte ich die Winkel der Servomotoren in den Beinen aus dem Ortsvektor der Beinspitze bestimmen. Die Winkel sollten bei gegebenem Ortsvektor ja eigentlich (zumindest mit 2 Lösungen) definiert sein. Ich habe das Problem mal skizziert und auch ein Gleichungssystem aufgestellt, welches mir aber weder selber noch mit Mathematica zu lösen gelingen mag. Mache ich einen Fehler? Stimmt das Gleichungssystem nicht? Oder ist es einfach nicht lösbar? 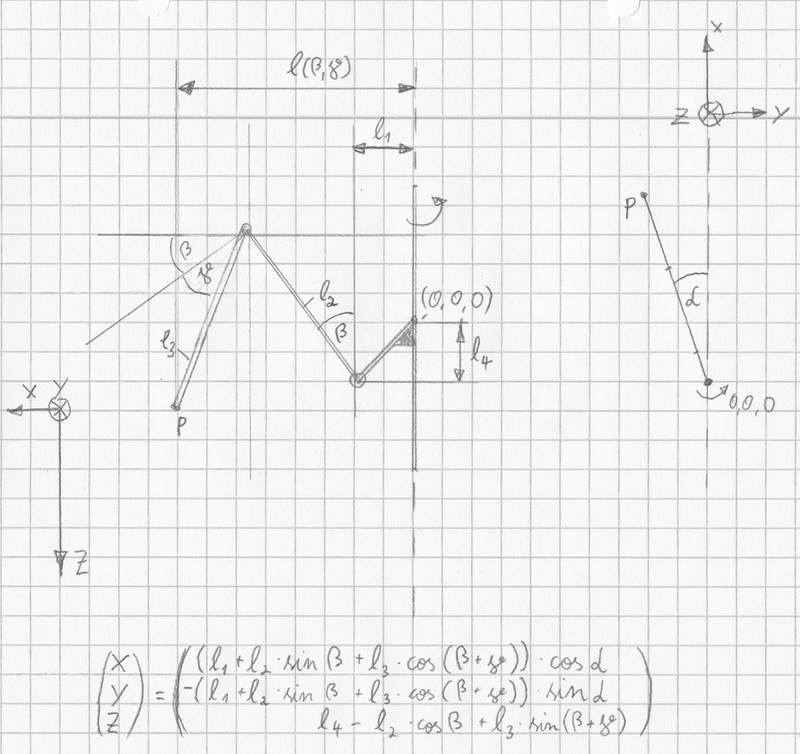 http://www.abload.de/img/armauiz.jpg http://www.abload.de/img/armauiz.jpgMfg, Robot |
||
| 30.06.2011, 09:38 | riwe | Auf diesen Beitrag antworten » |
| RE: Lösung eines Geometrischen Gleichungssystems welche größen sind gegeben, welche gesucht 
|
||
| 30.06.2011, 09:40 | Robot1011 | Auf diesen Beitrag antworten » |
gegeben sind alle Längen, x, y und z. Gesucht ist alpha, beta und gamma |
||
| 30.06.2011, 11:59 | Leopold | Auf diesen Beitrag antworten » |
Statt schreibe ich und setze . Dann lauten die drei Gleichungen: Zunächst liefert Division von durch den Tangens von , woraus sich berechnen läßt. Aus dem trigonometrischen Pythagoras folgt: Wenn nun gesichert ist, daß die Klammer rechts stets positive Werte hat (sind die Winkel und unterhalb von 90°, ist das zum Beispiel der Fall), dann folgt mit daraus Zusammen mit der Gleichung für , die bisher noch nicht verwendet wurde, hat man so ein Gleichungssystem für die Winkel und . Mit Hilfe eines CAS habe ich das umgeformt und folgende formale Lösungen erhalten: Beim Vorzeichen des hinteren Ausdrucks gehören jeweils die oberen und unteren Vorzeichen zusammen. Zur Abkürzung wurde dabei gesetzt. Inwieweit diese formalen Lösungen Gültigkeit beanspruchen können, vermag ich nicht zu beurteilen. Überprüfe das selbst. |
||
|
|
Verwandte Themen
| Die Beliebtesten » |
|
| Die Größten » |
| Die Neuesten » |
|
